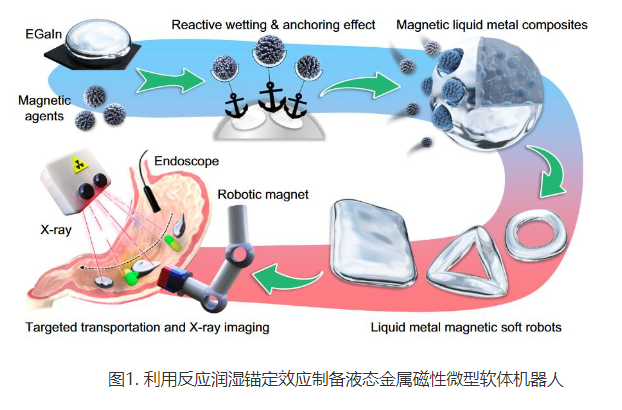
【哈工大(深圳) 宣】(材料科学与工程学院/文、图)近期,哈工大(深圳)材料科学与工程学院教授马星、副教授金东东提出了一种通过反应润湿机制将惰性且生物相容的Fe3O4磁性纳米粒子复合到共晶镓铟合金(EGaIn)中的策略,该突破性工作近期以《Reactive wetting enabled anchoring of non-wettable iron oxide in liquid metal for miniature soft robot》为题发表于《Nature Communications》。
针对Fe3O4和EGaIn之间固有的界面不润湿性问题,作者团队引入银作为中间过渡层制备了银包Fe3O4的核壳结构纳米粒子,从而在界面处与液态金属中的铟发生反应以产生AgxIny金属间化合物(IMCs)。该反应过程不仅促进了Fe3O4纳米粒子与EGaIn润湿(即反应润湿),还将磁性颗粒锚定在液态金属内部以提高磁驱动时的磁稳定性。随后,作者团队基于该复合材料体系构建了一种液态金属磁性微型软体机器人,其在外部磁场的驱动下能够实现各种可控变形和运动行为,且在内窥镜和X射线成像的原位监测下于离体猪胃中展现了靶向递送应用的实际可行性。该策略在未来不仅可以进一步拓宽液态金属复合材料体系库,也能为用于临床医学的磁性软体机器人提供新的思路。
相比刚性机器人,软体机器人能够实现更高自由度的变形,且在碰撞时更好地吸收能量,从而有效弥补机器与人之间机械性质的差异,提高应用中的安全性。若进一步赋予软体机器人以磁性并缩小至小尺度(毫米尺度及以下)后,则可以在磁场操控下实现人体环境中软体机器人的远程精确控制。此类磁性微型软体机器人有望进入人体中常规医疗手段难以触及的狭窄区域中执行任务,从而在生物医学领域展现出巨大的应用价值。
液态金属磁性软体机器人因其独特的不混溶性、可变形性和金属属性而受到广泛关注。为了构建该新型磁性软体机器人,研究人员使用了不同磁性金属粉末(Fe、Ni、NdFeB和Gd等)与液态金属(镓和共晶镓铟合金等)进行复合。然而,这些过程往往依赖于金属粉末与液态金属间的合金化作用或液态金属氧化膜黏附作用,制备得到的磁性液态金属复合材料存在磁性随时间衰退和金属粉末泄漏等潜在风险。如果使用磁性强、惰性且生物相容性好的四氧化三铁(Fe3O4)磁性材料,则会由于其与液态金属间巨大的表面能失配问题而展现出高度的不润湿性,从而无法实现液态金属与磁性材料的高效复合。
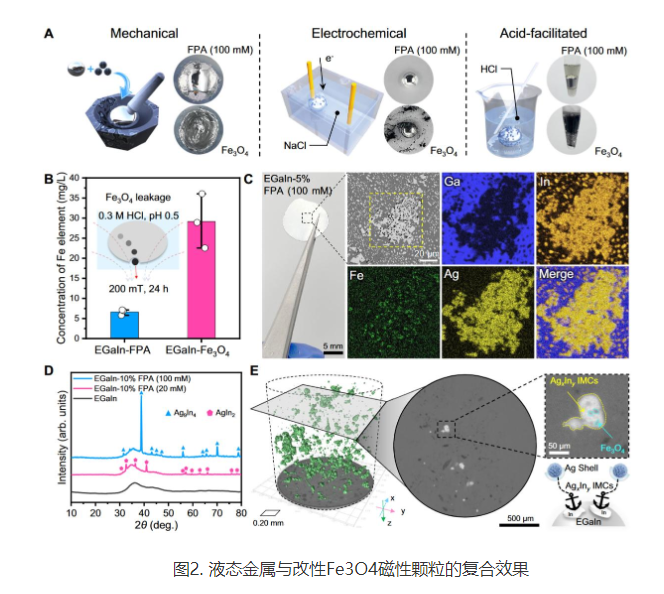
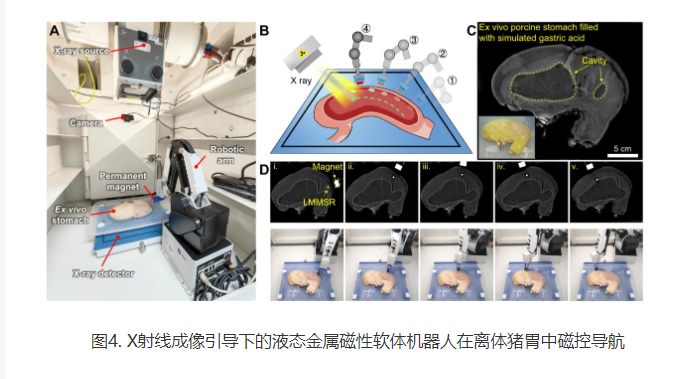
基于以上科学问题,该研究工作提出了一种消除金属氧化物与液态金属间表面能不匹配问题的复合材料制备策略,可有效提高两者之间的润湿性,并可通过机械研磨、电化学辅助、酸辅助等多种方式实现EGaIn和Fe3O4纳米颗粒之间的高效复合。制备的AgxIny金属间化合物有助于将磁性颗粒限制在EGaIn的内部中。借助AgxIny与液态金属强润湿性和不规则形貌,Fe3O4可以在酸性环境下稳定悬浮在液态金属中,并且在施加外部磁力时仍然有效。通过编程外部磁场的驱动控制,制备的磁性液态金属复合材料表现出多种大幅度的可控变形和运动行为(被动/主动变形、分裂、融合、迁移等),并进一步证明其能够在体外进行靶向货物运输。最后,在内窥镜和X射线成像的监测下,验证了所开发的液态金属磁性软体机器人应用于胃部环境的可行性,为液态金属微型软机器人的临床应用实现提供了有力支撑。
文章第一作者是哈工大(深圳)材料学院硕士研究生沈毅锋,马星、金东东为通讯作者。哈工大(深圳)为第一完成单位和通讯单位。该工作得到国家自然科学基金,广东省自然科学基金与深圳市科技计划资助。(审核:徐成彦)